区别于针对现有大型运输航空器的飞行控制、导航、通信和监视技术和体制,围绕城市地空复杂环境下的飞行控制、空地协同和运行监控问题,开展城市空中交通的特定场景下的飞行控制、导航、通信和监视等关键技术研究,为城市空中交通载具自主化、高密度运行提供技术支撑,主要研究方向如下:
(1)城市空中交通载具的自主飞行控制技术
UAM是个复杂的系统,为简化飞行操纵,降低对驾驶人员的技术要求,需要其执行任务的过程中能及时感知运行环境、自主实时完成动态航线规划、及时躲避静/动态障碍物、安全完成平稳起飞和降落等动作,并在个别传感器失效情况下保障系统的安全性。因此,通过UAM自主飞行控制技术研究,是保障UAM安全、可靠、稳定运行的关键。具体内容包括1)多源环境感知技术;2)基于人工智能技术的智能决策技术;3)具有强抗扰容错能力的飞行控制技术。
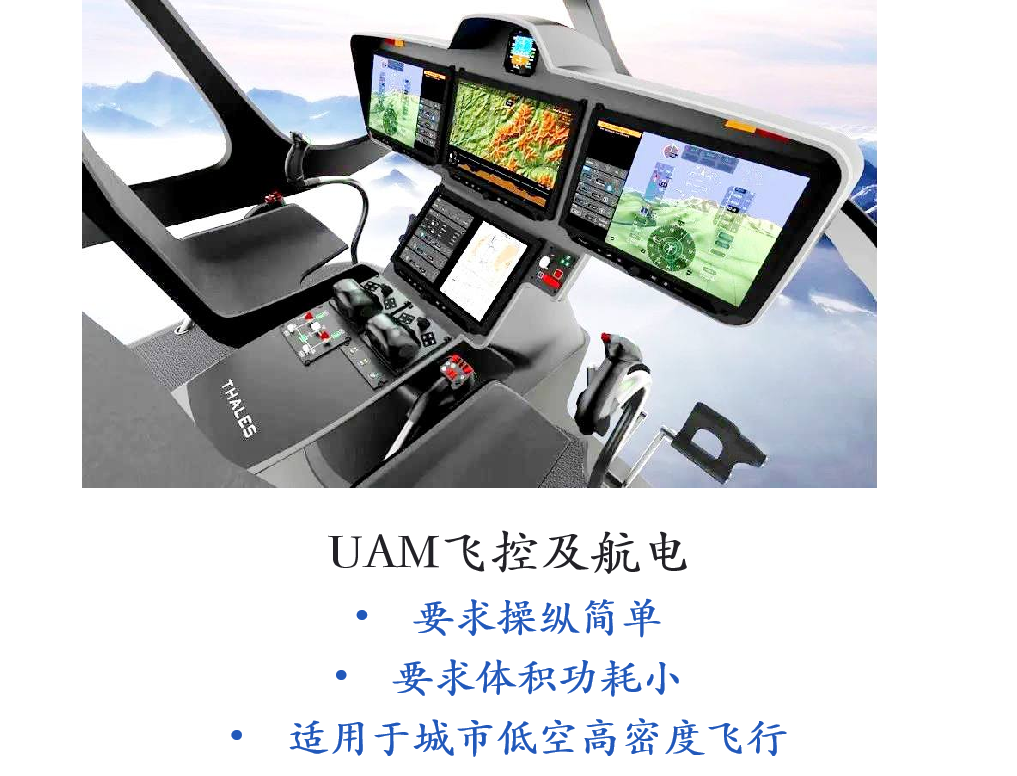
(2)轻量化低功耗的机载航电系统及构架技术
飞机的航空电子系统随着航空电子技术的飞速发展,越来越多的采用综合模块化系统(简称 IMA)架构,它通过统一的行业规范标准,为各功能驻留软件提供一个开放的平台资源。研究IMA 架构的机载航电系统可以减轻重量、降低能耗,在一定程度上提升系统功能的可靠性,提升系统的可升级性和可维护性,具体内容包括:1)无人机综合模块化航空电子体系架构技术;2)基于软件定义无线电的航电射频前端复用技术。
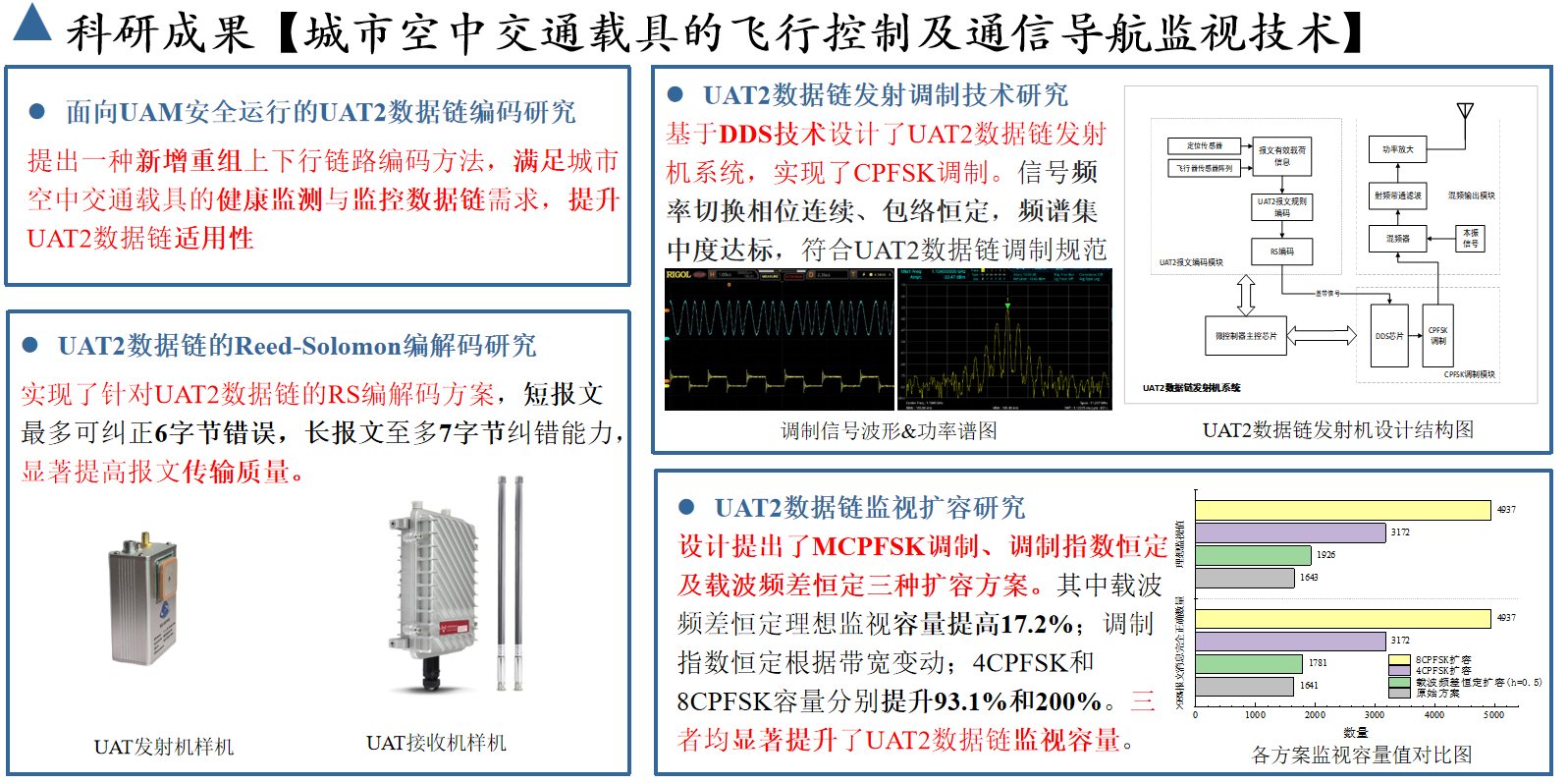
(3)城市可靠通信与低空导航监视技术
针对城市环境下无线电信号的多径效应、甚高频VHF以上频段视距传播特性以及通信信道的容量限制,为解决城市空中交通航空器与地面之间的地空可靠数据链通信、卫星导航和高密度飞行下的协同监视问题,具体内容包括:1)城市峡谷环境下卫星导航系统增强技术;2)远距离可靠C2数据通信技术;3)空地协同监视信道的扩容技术。