《电气传动控制系统实验讲义》
实验一 不可逆单闭环直流调速系统静特性的研究
一.实验目的
1.研究晶闸管直流电动机调速系统在反馈控制下的工作。
2.研究直流调速系统中速度调节器ASR的工作及其对系统静特性的影响。
3.学习反馈控制系统的调试技术。
二.预习要求
1.了解速度调节器在比例工作与比例—积分工作时的输入—输出特性。
2.弄清不可逆单闭环直流调速系统的工作原理。
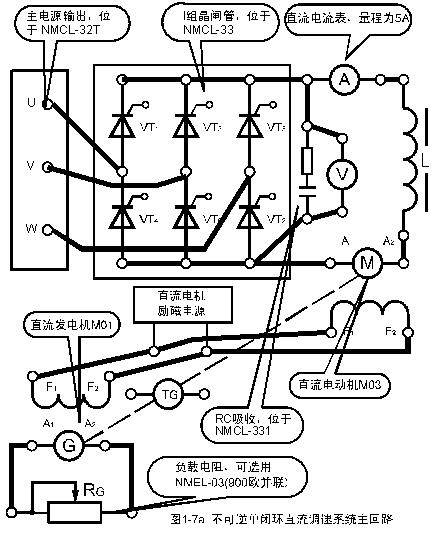
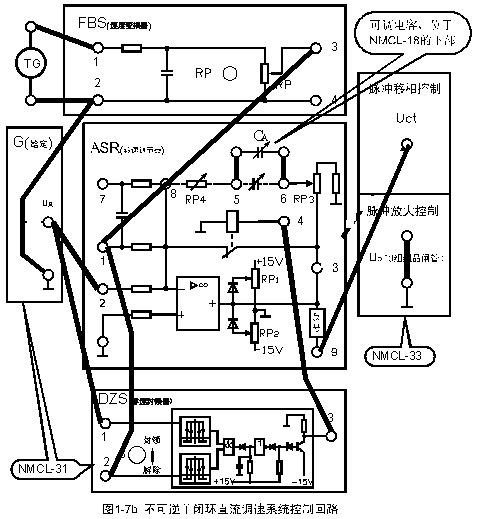
三.实验线路及原理
见图1-7。
四.实验设备及仪表
1.教学实验台主控制屏。
2.NMCL—31组件
3.NMCL—33组件
4.MEL—03A组件
5.NMCL—18组件
6.电机导轨及测速发电机(或光电编码器)、直流发电机M01
7.直流电动机M03
8.双踪示波器(自备)
9.万用表(自备)
五.注意事项
1.直流电动机工作前,必须先加上直流激磁。
2.接入ASR构成转速负反馈时, ASR的“5”、“6”端接入可调电容(预置7μF)。
3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。
4.三相主电源连线时需注意,不可换错相序。
5.系统开环连接时,不允许突加给定信号Ug起动电机。
6.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。
7.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
六.实验内容
1.求取调速系统在无转速负反馈时的开环工作机械特性。
a.断开ASR的“9”至Uct的连接线,G(给定)直接加至Uct,且Ug调至零,直流电机励磁电源开关闭合。
b.合上主控制屏的绿色按钮开关。
c.调节给定电压Ug,使直流电机空载转速n0=1500转/分,调节直流发电机负载电阻,在空载至额定负载的范围内测取7~8点,读取整流装置输出电压Ud,输出电流id以及被测电动机转速n。
2.测取调速系统在带转速负反馈时的无静差闭环工作的静特性
a.ASR “5”、“6”端接可调电容,可预置7μF,使ASR成为PI(比例—积分)调节器。
b.调节给定电压Ug,使电机空载转速n0=1500转/分。在额定至空载范围内测取7~8个点。
七.实验报告
绘制实验所得静特性,并进行分析、比较。
实验二 双闭环晶闸管不可逆直流调速系统
一.实验目的
1.了解双闭环不可逆直流调速系统的原理,组成及各主要单元部件的原理。
2.熟悉电力电子及教学实验台主控制屏的结构及调试方法。
3.熟悉NMCL-18,NMCL-33的结构及调试方法。
4.掌握双闭环不可逆直流调速系统的调试步骤,方法及参数的整定。
二.实验内容
1.各控制单元调试
2.测定电流反馈系数。
3.测定开环机械特性及闭环静特性。
4.闭环控制特性的测定。
5.观察,记录系统动态波形。
三.实验系统组成及工作原理
双闭环晶闸管不可逆直流调速系统由电流和转速两个调节器综合调节,由于调速系统调节的主要量为转速,故转速环作为主环放在外面,电流环作为付环放在里面,这样可抑制电网电压波动对转速的影响,实验系统的控制回路如图1-8b所示,主回路可参考图1-8a所示。
系统工作时,先给电动机加励磁,改变给定电压的大小即可方便地改变电机的转速。ASR,ACR均有限幅环节,ASR的输出作为ACR的给定,利用ASR的输出限幅可达到限制起动电流的目的, ACR的输出作为移相触发电路的控制电压,利用ACR的输出限幅可达到限制amin和bmin的目的。
当加入给定Ug后,ASR即饱和输出,使电动机以限定的最大起动电流加速起动,直到电机转速达到给定转速(即Ug=Ufn),并出现超调后,ASR退出饱和,最后稳定运行在略低于给定转速的数值上。
四.实验设备及仪器
1.教学实验台主控制屏。
2.NMCL—31组件
3.NMCL—33组件
4.MEL—03A组件
5.NMCL—18组件
6.电机导轨及测速发电机(或光电编码器)、直流发电机M01
7.直流电动机M03
8.双踪示波器(自备)
9.万用表(自备)
五.注意事项
1.三相主电源连线时需注意,不可换错相序。
2.系统开环连接时,不允许突加给定信号Ug起动电机
3.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。
4.进行闭环调试时,若电机转速达最高速且不可调,注意转速反馈的极性是否接错。
5.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
六.实验方法
1.双闭环调速系统调试原则
(1)先部件,后系统。即先将各单元的特性调好,然后才能组成系统。
(2)先开环,后闭环,即使系统能正常开环运行,然后在确定电流和转速均为负反馈时组成闭环系统。
(3)先内环,后外环。即先调试电流内环,然后调转速外环。
注意:. 速度反馈注意极性,接成负反馈,转速测量输出 “红色”端,接FSB的“黑色”端。转速测量输出 “黑色”端,接FSB的“红色”端。
ASR、ACR限幅值调节:
接好双闭环,断开主电源(电机不转),稍加给定(1V),调S1,拨正给定,分别量ASR(3孔)、ACR(7孔)电压,看万用表读数,为负值调RP2,为正值调RP1,使万用表读数为正负5伏。
2.开环外特性的测定
(1)控制电压Uct由给定器Ug直接接入。主回路按图1-8a接线,直流发电机所接负载电阻RG断开。
(2)使Ug=0,调节偏移电压电位器,使α稍大于90°,合上主电路电源,逐渐增加给定电压Ug,使电机起动、升速,调节Ug使电机空载转速n0=1500r/min,再调节直流发电机的负载电阻RG,改变负载,在直流电机空载至额定负载范围,测取7~8点,读取电机转速n,电机电枢电流Id,即可测出系统的开环外特性n=f (Id)。
注意,若给定电压Ug为0时,电机缓慢转动,则表明α太小,需后移
4.单元部件调试
ASR积分电容设为1.5微法。
ACR 积分电容设为7微法。
5.系统调试
将Ublf接地,Ublr悬空,即使用一组桥六个晶闸管。
(1)电流环调试
电动机不加励磁
(a)系统开环,给定器Ug直接接到NMCL-33上的脉冲移相控制电压Uct。接好万用表(红色表笔接NMCL-33上电流反馈If端) ,堵转电机,调给定Ug,观察电流表指针到1.1A,调NMCL-33上电流反馈RP1,使万用表读数为5伏,关主电源开关,恢复电机励磁。
(2)速度变换器的调试
电动机加额定励磁。
系统开环,即给定电压Ug直接接至Uct,Ug作为输入给定,调RP1使Ug归零,闭合主电源开关上电,调RP1渐加正给定,观察转速显示到1500转,调节FBS(速度变换器)中速度反馈电位器RP,使速度反馈电压为-5V左右。
接成双闭环调速系统,做以下实验:
6.系统特性测试
(1)机械特性n=f(Id)的测定
(a)调节转速给定电压Ug,使电机空载转速至1500 r/min,再调节发电机负载电阻Rg,在空载至额定负载范围内分别记录7~8点,可测出系统静特性曲线n=f(Id)
(2)闭环控制特性n=f(Ug)的测定
调节Ug,记录Ug和n,即可测出闭环控制特性n=f(Ug)。
7.系统动态波形的观察
用二踪慢扫描示波器观察动态波形,用数字示波器记录动态波形。在不同的调节器参数下,观察,记录下列动态波形:
(1) 突加给定起动时,电动机电枢电流波形和转速波形。
注意:突加给定方法:主电源闭合,调Ug到1500,NMCL-31的s2钮拨到“0”位置,然后把s2钮上拨。
示波器探头设置“1倍”,“直流”,通道1接ASR“1孔”,通道2接ACR“1孔”,示波器两个通道纵坐标2伏/格,横坐标500ms/格。探头1要设置成反相,因为速度是负反馈。如果波形不好可以调ASR,ACR的RP4.
(2)突加负载时,电动机电枢电流波形和转速波形。
(3)突降负载时,电动机电枢电流波形和转速波形。
注:电动机电枢电流波形的观察可通过ACR的第“1”端
转速波形的观察可通过ASR的第“1”端
七.实验报告
1.根据实验数据,画出闭环控制特性曲线。
2.根据实验数据,画出闭环机械特性,并计算静差率。
3.根据实验数据,画出系统开环机械特性,计算静差率,并与闭环机械特性进行比较。
4.分析由数字示波器记录下来的动态波形。
实验三 基于DSP的
矢量变换控制与直接转矩控制变频调速系统
一.实验目的
1.了解以TMS320F240为核心构成的全数字控制感应电机变频调速实验系统的硬件与软件组成。
2.掌握采用正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)的感应电机开环变压变频(VVVF)调速系统的工作原理、优缺点及应用场合。
3.掌握采用磁场定向控制(FOC)与直接转矩控制(DTC)的感应电机变频调速闭环控制系统的工作原理、优缺点及应用场合。
4.掌握不同控制方式时的系统稳态与动态特性以及有关控制参数变化的影响(注意无上位机时不能改变有关控制参数)。
5.掌握感应电机变频调速系统的实验研究方法,包括虚拟仪器的使用(注意无上位机时,实验系统无虚拟仪器功能,有关虚拟仪器的取消)。
二.实验内容
1.熟悉变频调速实验系统的配置与结构,在此基础上完成实验接线。并通过仔细阅读“MCL-13(V1.1)上位机程序使用说明”,熟悉在上位机界面上进行实验操作的方法(无上位机时不要求)。
2.采用正弦脉宽调制(SPWM)的开环VVVF调速系统的实验研究:
(1)分别在不同调制方式(同步、异步和分段同步)下,观测不同调制方式与有关参数变化对系统性能的影响,作比较研究:
①在同步调制时,观测载波比变化对不同速度下,定子磁通轨迹的影响;
②在异步调制时,观测载波频率变化对不同速度下,定子磁通轨迹的影响;
③在分段同步调制时,改变频率分段与各段载波比,观测不同速度下定子磁通轨迹的变化。
④比较不同调制方式的优缺点,总结参数调试经验。
注意,无上位机时可以在面板上用按钮选择调制方式,但涉及改变参数的研究将不能进行。
(2)测取系统稳态机械特性n=f (M);
(3)观测并记录启动时电机定子电流和电机速度波形iv=f (t)与n=f (t);
(4)观测并记录突加与突减负载时的电机定子电流和电机速度波形iv=f (t)与n=f (t);
(5)观测低频补偿程度改变对系统性能的影响。
3.采用空间矢量脉宽调制(SVPWM)的开环VVVF调速系统的实验研究:
(1)~(5)同前2。
4.采用磁场定向控制(FOC)的感应电机变频调速系统的研究:
(1)在默认参数下,测取系统的稳态机械特性n=f (M),观察定子磁通轨迹;
(2)观测并记录启动时电机定子电流和电机速度波形iv=f (t)与n=f (t);
(3)观测并记录突加与突减负载时的电机定子电流和电机速度波形iv=f (t)与n=f (t);
(4)研究速度调节器参数(P、I)改变对系统稳态与动态性能的影响;
(5)研究电流调节器参数(P、I)改变对系统稳态与动态性能的影响;
(6)研究转子回路时间常数(T2=Lr/Rr)改变对系统稳态与动态性能的影响;
以上(4)~(6)涉及参数改变,只能在有上位机时才能进行。
5.采用直接转矩控制(DTC)的感应电机变频调速系统的研究:
(1)~(4)同磁场定向控制系统;
(5)研究转矩与磁通调节器滞环宽度改变对系统稳态与动态性能的影响;
(6)研究定子电阻变化对系统稳态与动态性能的影响;
以上(4)~(6)涉及参数改变,只能在有上位机时才能进行。
6.对以上不同控制方式下感应电机变频调速系统的性能进行比较研究。
三.实验系统组成及工作原理
基于DSP的高性能变频调速系统原理框图如下图所示:
系统主电路采用交-直-交电压源型变频器,功率器件采用智能功率模块IPM,该模块包含了由六个IGBT、六个续流二极管、栅极驱动电路、逻辑控制电路以及欠压、过流、短路、过热等保护电路,模块的主电路部分共有5个端子,即直流电压输入端+、-,三相交流电压输出端U、V、W,控制部分共有15个端子,用于PWM信号输入、故障信号输出及驱动电源等,驱动电源为4组+15V电源,DSP生成的PWM信号需通过光耦合器隔离后输入。
该智能功率模块的应用,减小了装置的体积,提高了变频系统的性能与可靠性。
控制系统由DSP、信号检测电路、驱动与保护电路等组成,DSP采用美国TI(Texas Instruments)公司于1998年推出的16位数字信号处理器 (Digital Signal Processor简称DSP)TMS320X24x系列芯片,该芯片是专门为电机的数字化控制而设计的,它集DSP的信号高速处理能力及适用于电机控制的优化外围电路于一体,为电动机数字控制系统应用提供了一个理想的解决方案,从而成为传统的多微处理器单元和昂贵的多片设计的理想替代,每秒执行20兆条指令的运算能力,使该系列芯片能提供比传统16位微处理器强大得多的性能。
该系列芯片的16位定点DSP内核为模拟设计者提供了一个数字解决方案,并且不会牺牲原有系统的精度和性能,事实上,由于可以采用诸如自适应控制、卡尔曼滤波和状态控制等先进的控制算法,因而增强了系统性能。
高速CPU允许数字控制设计者能够实时处理算法而不需通过查表只能获得近似值,几乎所有的指令都可在50ns的单周期内完成,如此高的性能可以对非常复杂的控制算法进行实时运算,此外,还可支持非常高的采样率,以减小循环延时。
作为系统管理器,DSP必须具备强大的片内I/O和其它外设功能,该系列芯片内的事件管理器可以为所有电机类型用户提供高速、高效和全变速的先进控制技术。在该事件管理器中,包括特殊的PWM产生功能,特殊的附加功能包括可编程的死区功能和空间矢量PWM,后者可为三相电机在功率管逆变器控制中提供最高的功效,三个独立的向上/下计数器,每一个都有属于它自己的比较寄存器,可以支持产生非对称的和对称的PWM波形,四路捕获输入中的两路可以直接连至光电编码器的正交编码脉冲信号。
该系列芯片的应用,大大简化了高性能变频调速系统的硬件设计,使系统具有高的性能价格比,该系列芯片,除适用于工业电机驱动外,还可广泛地应用于功率变换器和控制器、汽车系统,如电子动力转向装置、刹车和温度控制、仪表电机控制、打印机、复印机等办公产品、磁带驱动、机器人和计算机数字控制(CNC)机械等。
实验系统中使用的DSP为TMS320F240,其内部包含16K字的Flash(闪速)EEPROM。
此外,已为实验组件配备了与上位计算机通讯的接口和上位机软件。需要进行有关参数改变影响的实验,必须配备上位机,并在实验前安装好上位机软件和仔细阅读上位机操作说明。
四.实验设备和仪器
1.教学实验台主控制屏
2.NMCL-13A闭环变频系统组件
3.电机导轨、直流发电机
4.NMEL—03A三相可调电阻器
5.异步电动机M04A(含高分辨率编码器)(接成角形)
6.双踪示波器(自备)
7.上位机和通讯联接线(自备)
五.实验步骤
1. 参看图2-6,连接主电路、起动限流、过流保护、过压保护及磁通检测等环节的连线。(有上位机时,连接上位机与组件间的串口通讯线。)
注意:连接计算机如果是COM1口,在控制软件上也要选COM1口。
打开 NMCL-13A 板上的”ON”,点控制软件上的“系统连接”;闭合主电源,点控制软件“电机起动”。点“断开连接”前先关闭主电源。
2.按下起动按钮前,检查给定电位器是否放在零位(要求电位器左旋到底)。
3.三相调压器逆时针调到底,合上主控制屏上的绿色按钮开关,调节三相调压器的输出,使Uuv、Uvw、Uwu均为220V。注:如您选购的产品为MCL-Ⅲ、Ⅴ,无三相调压器,则直接合上主电源。以下均同。
4.开环变频系统性能测试
(1)必须在接线检查无误后,合上NMCL-13组件左下方的电源开关,这时系统缺省设置为开环变频调速系统的SPWM控制同步调制方式状态。
(2)揿起动按钮,逐渐增大给定(给定电位器向顺时针方向旋转),观察系统工作是否正常,确认系统工作正常后,再逐渐加大给定直至频率达到50HZ。
(3)用示波器测定电机线电压、线电流波形。(测试孔iv或iw与地之间波形)
(4)用示波器测定定子磁通分量φα波形。
(5)将φα端与地线接到双踪示波器(自备)Y轴输入端与地端,再将φβ端接到示波器的X轴输入端,观测定子磁通φ的轨迹。
(6)用示波器测定突加或突减给定时的iv=f (t)与n=f (t):
① 揿停止按钮,观察并记录iv=f (t)
② 给定电位器仍在上述位置,揿起动按钮,即可测得突加给定时的iv=f (t)
③ 同上步骤,观察并记录n=f (t)
(7)系统机械特性测试:
在上述给定条件下,负载从轻载按一定间隔加至额定负载,测出机械特性曲线n=f (M)(8)突加与突减负载时的iv=f (t)与n=f (t)测试:
负载加至1/2额定负载,在突加与突减负载条件下,观察并描绘iv=f (t)与n=f (t)波形
(9)改变调制方法、方式和有关的调制参数(注意改变参数只能在上位机界面上进行),观察对系统性能的影响。
5.闭环变频调速系统采用磁场定向控制时的性能测试:
揿磁场定向控制按钮,使系统工作在闭环变频调速系统的磁场定向控制状态,先调节给定电位器使系统工作在50HZ,然后进行以下测试:
(1)测量电动机线电压、线电流、气隙磁通分量φα和气隙磁通φ的波形。
(2)观察与描绘突减与突加给定时的iv=f (t)与n=f (t)波形。
(3)在50Hz与5Hz时的闭环变频系统的静特性测试。
(4)观察与描绘突加与突减负载时的iv=f (t)与n=f (t)波形。
(5)改变速度和电流环PID调节器的控制参数(注意:改变参数只能在上位机界面上进行),观察对系统性能的影响。
6.闭环变频系统采用直接转矩控制时的性能测试:
揿直接转矩控制按钮,使系统工作在闭环变频调速系统的直接转矩控制状态,先调节给定电位器使系统工作在50HZ,然后进行以下测试:
(1)测量电动机线电压、线电流、气隙磁通分量φα和气隙磁通φ的波形。
(2)观察与描绘突减与突加给定时的iv=f (t)与n=f (t)波形。
(3)在50Hz与5Hz时的闭环变频系统的静特性测试。
(4)观察与描绘突加与突减负载时的iv=f (t)与n=f (t)波形。
(5)改变速度环PID调节器的控制参数与转矩、磁通滞环控制器的容差(注意:改变参数只能在上位机界面上进行),观察控制参数变化对系统性能的影响。
注意:有上位机时,上述的部分操作必须在上位机界面上进行,有关操作步骤请参看“MCL-13(V1.1)上位机程序使用说明”。
六.实验报告
1.分别画出50HZ时开环变频调速系统,磁场定向控制变频调速系统及直接转矩控制变频调速系统的下述波形:
(1)电动机线电压、线电流波形;
(2)定子磁通分量φα和定子磁通φ的轨迹;
(3)突加与突减给定时的iv=f (t) 与n=f (t);
(4)突加与突减负载时的iv=f (t) 与n=f (t)。
2.画出开环变频调速系统的机械特性与闭环变频调速系统的静特性曲线,并分别计算出它们的静差率S值。
3.根据实验数据,试分别对开环变频调速系统、磁场定向控制变频调速系统以及直接转矩控制变频调速系统的优缺点与适用场合,作一分析比较。
4.分别对开环变频调速系统、磁场定向控制变频调速系统及直接转矩控制变频调速系统,分析有关参数改变对系统性能的影响(无上位机时不进行)。
5.实验的收获、体会与改进意见。